Le microcontrôleur (µC) est le composant principal du robot, c'est en quelque sorte son cerveau. En effet c'est lui qui permet de gerer les sorties (moteurs, buzzer) en fonction des entrées (ordres FM, fourches optique, contacteurs).
C'est un composant programmable, c'est à dire qui faut rentrer un programme dans sa mémoire pour le faire fonctionner. Concretement on code ce programme sur PC et un compilateur adapté s'occupe de compiler le programme en langage machine (hexadécimal) et de l'envoyer par un port serie ou paralelle dans le µC.
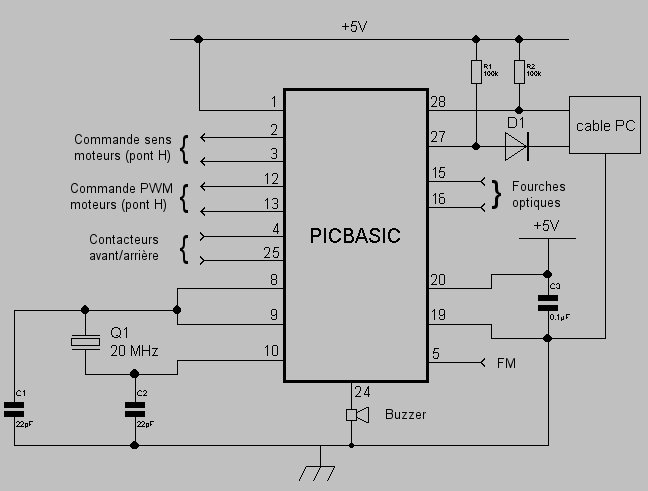
Le microcontrôleur utilisé pour notre robot est un PICBASIC PB-3B (produit par COMFILE). Il est extremement simple à metre en oeuvre car un environnement de programmation est fournit dans lequel on programme en BASIC et il ne nécessite pas de carte électronique pour rentrer des programmes. Le langage BASIC est très simple et les fonctions données sont très puissantes (par exemple la fonction PWM qui permet de commander un moteur CC en une ligne de code).
Plus de détails à cette adresse : http://www.lextronic.fr/Comfile/PP1.htm
Schema :